Gudrun
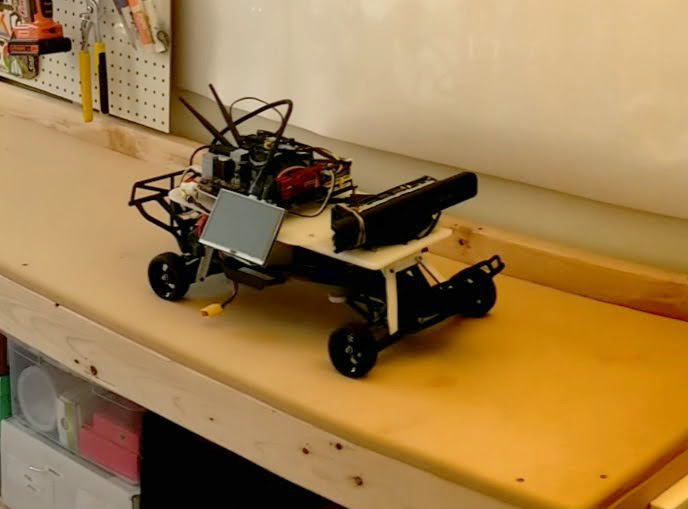


This robot can be thought of as a variant of the Donkey car, using one of the recommended chassis. However, instead of controlling it with a Raspberry Pi, I use a mini-ITX computer I built for a previous project. In future work, it might be nice to replace the motherboard with a slim-mini-ITX, a standard which includes a 19VDC power jack. I use something like this to provide motherboard power from a ~16V DC source, with a 12V regulator between.
I use this battery which can source 100 amps according to this calculator, and appears to be fine for about an hour of use powering all sensors, SLAM, and the drive motor.
In a later iteration, I might use the more power-efficient Nvidia TX2, but, for this build, I want to minimize the specialness of the computer as much as possible, so that everything is just standard Ubuntu. (The TX2, like the Raspberry Pi, runs linux with an ARM CPU, instead of a "normal" x86_64 CPU, meaning installing software is often harder.)
Gudrun will be the successor to two previous builds of mine, Hogni and Gunnar, all three of whom were mythologically siblings. (Also, note to self, if I want to continue this naming scheme, there's a good list at the bottom of that article.)
Entries
Architectural plan 28 February 2019
Simple ultrasound reactive control 26 February 2019
Open-loop control of speed 2 March 2019
Timed-elastic-band path planning 3 April 2019
Reading encoder speed 8 April 2019
Fusing Adafruit 9DoF data with imu_filter_madgwick 14 April 2019
Using Intel RealSense for mapping 27 August 2019